Heltec V4 Meshtastic Review
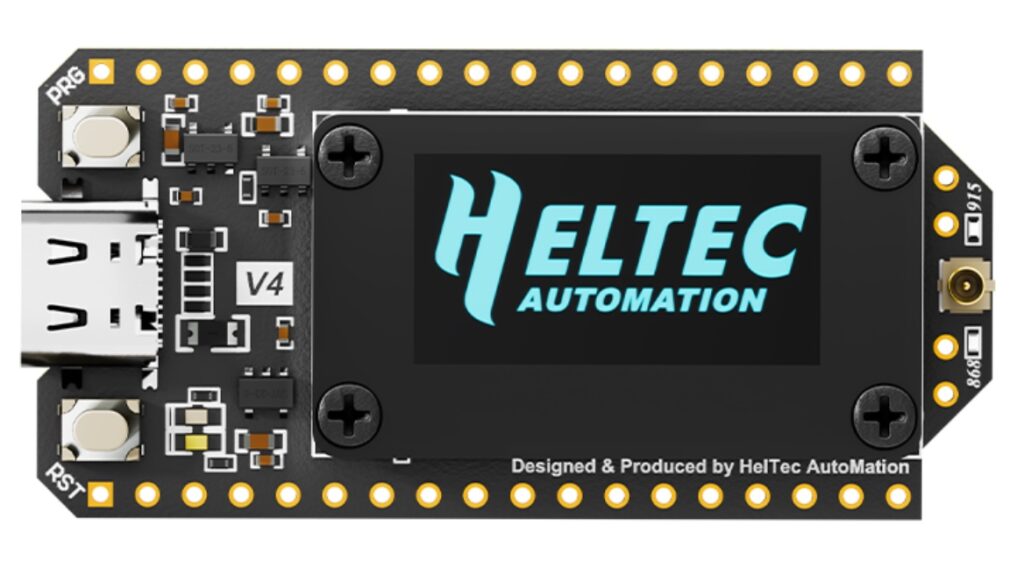
I’ve recently rediscovered Meshtastic and have built up several nodes in the past week. It’s not that I need more of them, I just enjoy testing the various boards. In this entry we’ll be looking at the Heltec V4 Meshtastic LoRa 32 board. In my opinion this is one of the better boards for installing in a solar fixture.
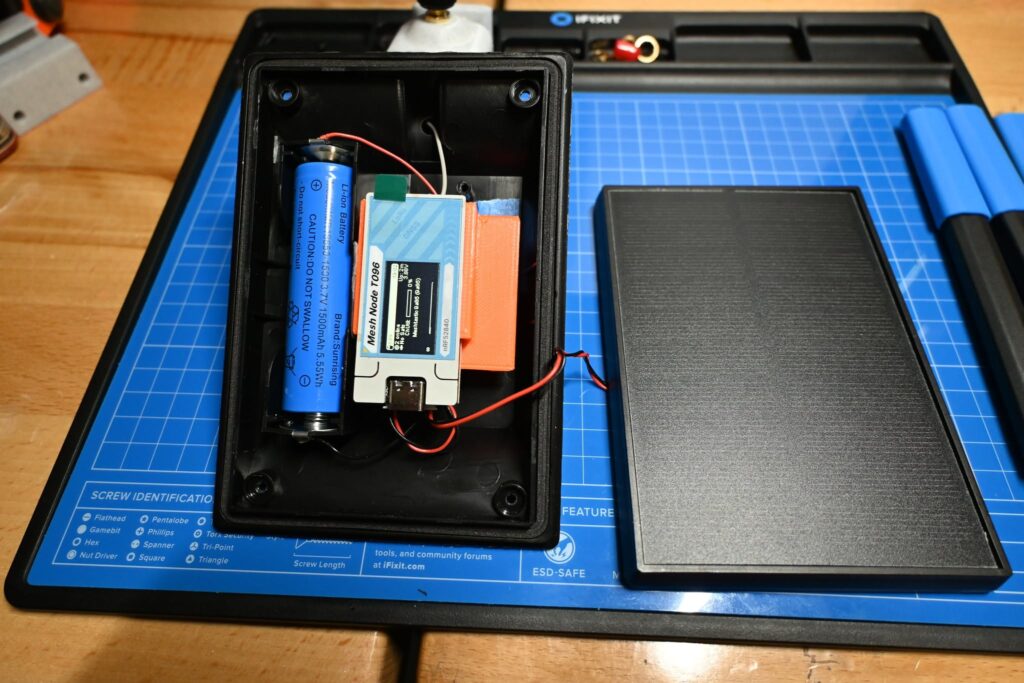
It seems like the latest crop of Meshtastic boards are designed to integrate easily into solar fixtures. The Heltec V4 is no exception. It comes with everything you need for a solar installation.
- Heltec V4
- 2 cables with JST terminations. One for solar, one for lithium battery.
- Antenna
- Pin Headers
The Heltec V3 and V4 are nearly identical however the V4 has higher transmit power.
Continue reading